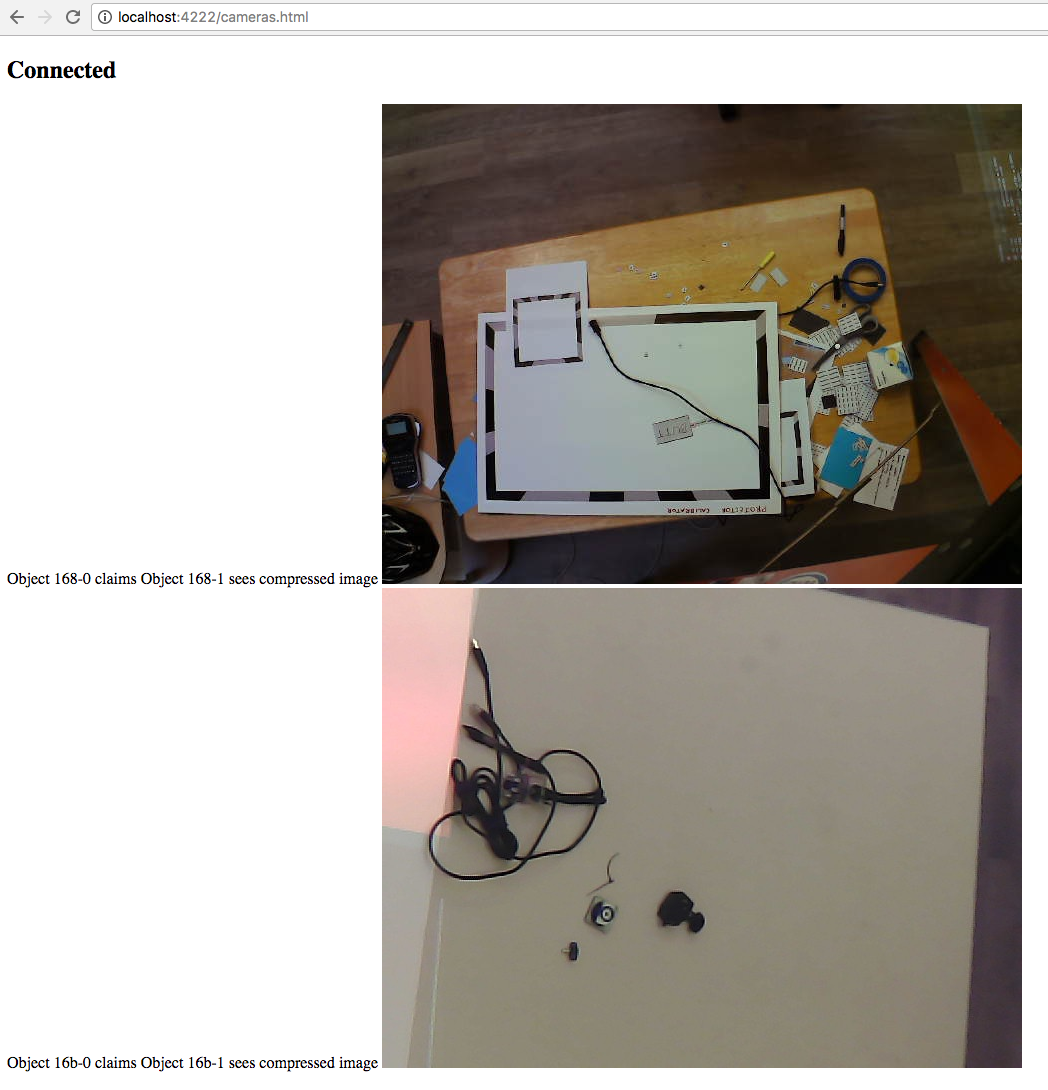
Josh got the "_ sees compressed image _" claims going on the realboxes and now we have a preliminary live camera feed!
It's checked in to rtwebinspector as cameras.html.
This is great for me as I can now work on framecode CV stuff on proper images!
The updating is a little choppy but it works. On the inspector side I'm just filtering for the "compressed image" samples and enforce a sorting order on the objects to keep them from flip flopping.
You can also click the images to open them in a new tab (something I found useful on my other image inspectors).
On Mon, Apr 17, 2017 at 2:43 PM, Joshua Horowitz wrote:
Here are some good statements we oughta make about cameras--[] claims [camera] is a "camera"[] claims [camera] sees image [image][] claims [camera] sees compressed image [jpeg compressed image]"[image]" is raw camera bytes. Right now, the format for [image] is:[[[720,1280],["depth_8u"],3],{"_bytes":" f5adb4a5309adfc4cb6e9b605c3946 38"}] This is just what Haskell/Realtalk bindings automatically produce from OpenCV image arrays. It includes resolution, bit depth, number of channels, and raw bytes.We really ought to establish some more semantically meaningful format for this. Something like:{ width: 1280, height: 720, depth: "8U", space: "RGB", data: {_bytes: "f5adb4a5309adfc4cb6e9b605c3946 38"} }If anyone has thoughts on this format, reply away!(For now, we'll use the existing format. This will be enough to inspect camera images in the browser (using the "compressed" statement) and to make CV pipelines in Haskell.)Cheers & thanks,Josh
************************
************************